
Libro, edito nel 1943 dalla Regia Accademia Navale, dai contenuti molto tecnici e quindi destinato ad una utenza qualificata, come erano appunto gli allievi ufficiali della Regia Marina.
Il Rilascio Avverrà tramite questo sito - www.grupsom.com - con pagine WEB create appositamente con i Crediti necessari e solo per la CONSULTAZIONE e le pagine non potranno essere Salvate.
Il Comando di Grupsom Ringrazia il C.te Millelire per aver messo a disposizione questo prezioso Manuale.
Apparato Motore di Propulsione in Immersione
Paragrafo 1 °
CONSIDERAZIONI SUGLI ELETTROMOTORI DI PROPULSIONE.
I primi motori adoperati sui sommergibili in immersione, dopo ivari sistemi meccanici a braccia, furono quelli elettrici, adottatiper la prima volta nel 1886 in Francia sul Gymnote e sul Gustave Zedè. Essi però non avendo ancora raggiunto un grado di perfezione tecnica elevato, erano malsicuri per quanto riguardava le operazioni di cambio di marcia e di regolazione della velocità. A questi inconvenienti si cercò di rimediare, sistemando delle eliche a passo variabile(in Italia sul Velella), regolazione che si otteneva mediante un albero interno a quello delle eliche e che permetteva il cambio di marcia e di
velocità. Si notò subito che il rendimento propulsivo di quell'elica diminuiva, notevolmente per le basse andature, nelle quali l'angolo di orientamento era piccolo e si conservava sempre al disotto di quello delle eliche a pale fìsse. Si dovette perciò aspettare che la tecnica perfezionasse i motori elettrici, in modo tale che con essi fosse possibile non solo il rovesciamento di marcia, ma anche le regolazioni di velocità per un vasto campo, da un minimo ad un massimo. Se il motore elettrico con gli accumulatori, presenta notevoli svantaggi e primo fra tutti quello dell'eccessivo peso, che ne limita la velocità e l'autonomia,
d'altra parte esso sì è dimostrato il motore per la navigazione in immersione perchè è silenzioso, di sicuro e docile funzionamento, non ha prodotti di scarico, non consuma aria respirabile e sviluppa calore in modeste proporzioni.
ELETTROMOTORI PER SOMMERGIBILI.
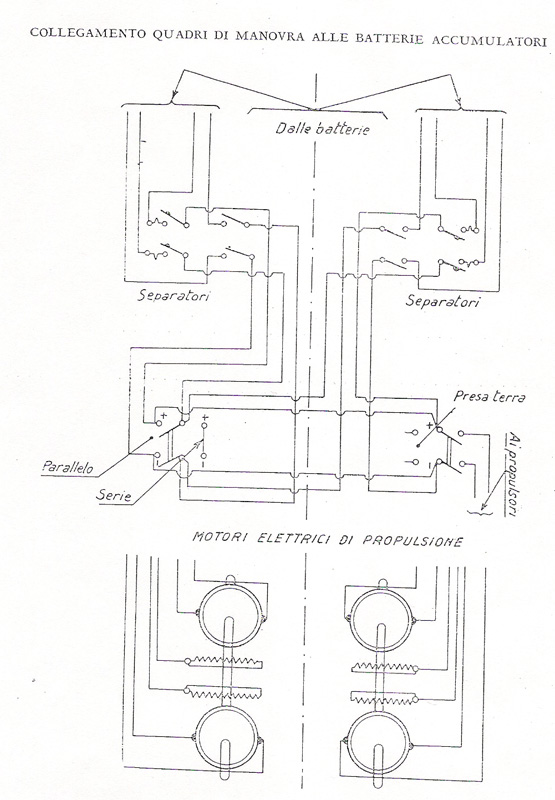
Benchè sugli impianti a terra i motori elettrici avessero raggiunto un notevole grado di perfezione, bisognò adattarli a bordo dei sommergibili alle condizioni ambientali difficoltose e particolarmente umide, con l'impiego di isolanti speciali non igroscopici. L'impiego degli accumulatori come sorgenti di elettricità limita le tensioni fino a circa 240 volta, perche non è possibile accrescerne notevolmente il numero a causa del loro peso rilevante. Limitando la tensione fu giocoforza au- mentare la corrente di lavoro (superiore ai 3000 A. per motore sui sommergibili moderni) e quindi ingrandire le sezioni dei conduttori di rame aumentando notevolmente l’effetto youle (..ndr…Joule) della produzione di calore. Per smaltire questo calore fuori del sommergibile, è stato necessario sistemare appositi refrigeranti e ventilatori. Per il cambio di marcia e la regolazione di velocità è stato necessario munire i motori di poli ausiliari di commutazione e di avvolgimenti di compensazione per evitare la produzione di scintille sui collettori e quindi un rapido logorio. L'ubicazione stessa dei motori elettrici, vincolata a poppavia dei motori termici, ha fatto si che per rispettare i dati di potenza richiesta,i diametri hanno dovuto essere contenuti in limiti ristretti e gli indotti per conseguenza si sono allungati. Per avere un esteso campo di regolazione per velocità che vanno da mg. 2,5 fino a 10 ed oltre, si è dovuto influire oltre che sul campo, anche sulle tensioni. Non si è ritenuto opportuno influire sulla regolazione di corrente agli indotti,perche eventuali reostati sarebbero risultati poco economici,ingombranti e di non facile uso. Per la regolazione della tensione, si sono riuniti gli elementi delle batterie in 2 o 4 sottobatterie aggruppandole in serie o in parallelo mediante la manovra di semplici commutatori e lo stesso si è fatto per gli indotti, che risultando troppo
lunghi sono stati divisi in 2, con la possibilità di accoppiarli in serie o in parallelo,ottenendo così variazioni di tensioni da 60 fino a 240 volta (…ndr…Volts).Per le regolazioni di velocità attualmente si adoperano i seguenti tre accoppiamenti che servono per tutte le gamme di velocità previste : Indotti in serie - Batterie in parallelo (per basse velocità) Indotti in parallelo - Batterie in parallelo (per medie velocità) Indotti in parallelo - Batterie in serie (per forti velocità).
DESCRIZIONE DEL MOTORE ELETTRICO PER SOMMERGIBILE.
Il motore elettrico per sommergibile è generalmente del tipo a doppio indotto, con eccitazione in derivazione, poli ausiliari ed avvolgimento di compensazione. Esso è stagno nella parte inferiore per evitare possibili infiltrazioni di acqua che eventualmente dovesse raccogliersi in sentina. La carcassa è doppia : esterna ed interna. Quella interna può ruotare rispetto a quella esterna in maniera da portare i poli inferiori nella parte superiore onde permetterne la visita e la riparazione senza
dover smontare gli indotti. L’arco portaspazzole è costruito in modo che previo allentamento dei bulloni, può compiere una rotazione completa, in modo da cambiare le eventuali spazzole deteriorate. I poli principali sono costituiti da un pacco di lamierini tranciati dello spessore di 5/10 di m/m. e tenuti insieme per mezzo di viti. Le bobine del campo principale, montate sul nucleo dei poli sono formate da filo di rame isolato con fasciature di micanastro e verniciatura. I poli ausiliari sono formati da un nucleo di ferro fucinato, coperto da una guaina isolante di mica e fissati con perni alla carcassa. L’avvolgimento compensatore è costituito da alcune sbarre di rame per ogni polo, infilati in altrettante cave nelle espansioni dei poli principali. Parallelamente all’asse i collegamenti laterali degli avvolgimenti compensatori sono in rame piatto. La parte rotante, cioè l’indotto, è formata da un asse sul quale sono montati due indotti elementari con collettori distinti e costituiti da due lanterne di acciaio fuso, calettate a forte pressione nell’asse con chiavette di sicurezza. Sulle lanterne sono sistemati i pacchi lamellari, con lamelle dello spessore di 5/10 di mm., nelle cui cave perimetrali sono disposti gli avvolgimenti del tipo « in parallelo embricato »progressivo ad 8 vie interne. I pacchi lamellari sono calettati con chiavette sulle lanterne e sono compressi da flange terminali fissate con chiavette. Dalle testate degli avvolgimenti escono da un lato i collegamenti per gli equipotenziali e dall'altro lato quelli per le lamelle del collettore. Gli equipotenziali sono costituiti da conduttori di rame iso-
lato, mentre il collettore è formato da un corpo di acciaio fuso, solidale con le lanterne dell’indotto a mezzo di prigionieri. La connessione elettrica tra la parte fissa e quella mobile è ottenuta per mezzo di spazzole di carbone grafitico portate da un portaspazzole. Per la rotazione delle carcasse interne, sulle quali sono fissati i poli, esistono le impronte di una ruota elicoidale che ingrana con una vite senza fine manovrabile con cricco. Le temperature massime che non devono essere sorpassate durante il funzionamento variano dagli 80° ai 90° c. Per mantenere dette temperature esiste un sistema di refrigerazione e ventilazione forzata. Il massimo del riscaldamento si verifica con le andature minime, sia in funzione da motori che da dinamo, perchè allora la corrente d’eccitazione è massima ed inoltre alle basse andature la ventilazione automatica che effettua il motore, in conseguenza del moto, è minima.